Ahoj, chci se zeptat, zda jste se někdo pokoušel postavit tiskárnu s krokáčema s enkodérem. Zkouše jsem pátrat, ale nic jsem k tomu nenašel.
Představoval bych si tyhle motory:
https://www.robotdigg.com/product/1139/ ... ry-encoder
Předem díky za reakce simulin
motory s enkodéry
Příspěvků: 17
• Stránka 1 z 2 • 1, 2
Re: motory s enkodéry
![]() od fdd1222 » 05.04.2018 13:59
od fdd1222 » 05.04.2018 13:59
A k cemu by to melo byt dobre?
Kdyz motor bude ztracet krok, stejne to nema jak dohnat. Krokac neni servo.
Kdyz motor bude ztracet krok, stejne to nema jak dohnat. Krokac neni servo.
- 0
- fdd1222
- Příspěvky: 511
- Images: 0
- Registrován: 12.11.2016 19:59
- Reputation: -5

Re: motory s enkodéry
![]() od zemciko » 05.04.2018 16:23
od zemciko » 05.04.2018 16:23
Programově to normálně dohnat může. Zaškobrtne ti někde o materiál a neudělá ti zub ale vrátí se na původní polohu, tedy teoreticky.
- 0
Re: motory s enkodéry
![]() od Saph » 05.04.2018 16:34
od Saph » 05.04.2018 16:34
Nepamatuji si, kdy naposled mi nějak přeskočil motor a ujel tisk... to se stává tak hrozně zřídka, že mi přijde opravdu zbytečné v této oblasti cokoliv vymýšlet.
- 0
- Saph
- Příspěvky: 572
- Registrován: 20.09.2015 19:50
- Bydliště: Kroměříž
- Reputation: 0
Re: motory s enkodéry
![]() od MichalG » 05.04.2018 16:38
od MichalG » 05.04.2018 16:38
zemciko píše:Programově to normálně dohnat může. Zaškobrtne ti někde o materiál a neudělá ti zub ale vrátí se na původní polohu, tedy teoreticky.
pokud ti extruder zavadi o material a preskoci ti kroty tak je to jen o tom ze mas naprosto spatne nastavene drivery/rychlosti
- 0
Nabizim tistene dily
- MichalG
- Příspěvky: 393
- Images: 0
- Registrován: 28.03.2017 23:15
- Reputation: 2
")
Re: motory s enkodéry
![]() od fdd1222 » 05.04.2018 17:16
od fdd1222 » 05.04.2018 17:16
Kdyz uz ztrati krok, je stejne tisk pokazeny. Maximalne by to mohlo tisk ukoncit aby se zbytecne netisklo dal.
Vyhoda tech enkoderu je v tom, ze jakmile se poloha zacne ztracet, driver prida motoru proud a ten krok neztrati. Jenze tohle klasicky krokac nedokaze.
Vyhoda tech enkoderu je v tom, ze jakmile se poloha zacne ztracet, driver prida motoru proud a ten krok neztrati. Jenze tohle klasicky krokac nedokaze.
- 0
- fdd1222
- Příspěvky: 511
- Images: 0
- Registrován: 12.11.2016 19:59
- Reputation: -5
Re: motory s enkodéry
![]() od peterhe » 06.04.2018 19:09
od peterhe » 06.04.2018 19:09
Enkodery sa používajú na to aby sa poloha dotiahla, motor je napájaný -riadený až kým nedosiahne požadovanú polohu, ale je potrebné aby to sw resp. fw podporoval. Pri lepsich made in home cnc sa to niekedy používa a v priemyselnych je Enkoder úplne bežná záležitosť ale V spojitosti so servami a nie krokovymi motormi.
- 0
- peterhe
- Příspěvky: 101
- Registrován: 27.02.2017 17:23
- Bydliště: Trenčín
- Reputation: 0
Re: motory s enkodéry
![]() od simulin » 11.04.2018 13:02
od simulin » 11.04.2018 13:02
peterhe píše:Enkodery sa používajú na to aby sa poloha dotiahla, motor je napájaný -riadený až kým nedosiahne požadovanú polohu, ale je potrebné aby to sw resp. fw podporoval. Pri lepsich made in home cnc sa to niekedy používa a v priemyselnych je Enkoder úplne bežná záležitosť ale V spojitosti so servami a nie krokovymi motormi.
V průmyslu je enkodér běžný i ve spojení s krokovým motorem. Nešlo mi úplně o filozofický rozbor, ale spíš jestli s tím někdo nemáte zkušenost...
Jinak vše děkuji za reakce.
- 0
- simulin
- Příspěvky: 4
- Registrován: 01.08.2016 10:21
- Reputation: 0
Re: motory s enkodéry
![]() od fdd1222 » 11.04.2018 15:23
od fdd1222 » 11.04.2018 15:23
Filozoficky rozbor proto, abys pochopil ze pro tiskarnu je to k nicemu 
Ja to na krokacich pouzivam v jednom jednoucelovem CNC obrabecim stroji, ale jen pro hlidani vypadku kroku.
Takze postrehy z praxe: Pro tento ucel se to pouzit da, ale je tam nekolik zadrhelu se kterymi je treba pocitat.
Krokovy motor se vzdy za polohou danou prichazejicimi pulzy trochu zpozduje. To zpozdeni je zavisle na otackach a zatizeni motoru. S tim se musi system do ktereho je zapojen enkoder poprat. U otacek to neni celkem problem, u zatizeni ano, protoze ho system nezna. Z tohoto (a mnoha jinych) duvodu je i nesmysl nejakym zpusobem dorovnavat polohu za chodu motoru.
Pokud by se nejake dorovnavani melo konat, musel by system spocitat v realnem case polohovou, rychlostni i momentovou PIDku a vysledek nejakym zpusobem prenest na motor. Jenze to by arduino nestihalo ani kdyby obsluhovalo jediny motor a nedelalo nic jineho, bezne drivery na to nejsou stavene a ani krokac nedokaze v potrebne chvili zvysit nekolikanasobne moment tak jako servo.
Ja to pouzivam ve stroji proto, ze pokud se neco zasekne apod., pokundi se hodne drahy dil ktery se obrabi, havarie by mohla byt celkem nebezpecna pro obsluhu a ani nastroje nejsou za hubicku. Funguje mi to tak, ze pokud se lisi zadana a skutecna poloha o vic nez 20 mikrokroku, system vyhlasi chybu ztrata kroku a zastavi stroj. Na nic jineho enkoder u beznych krokacu pouzitelny neni, takze pochybuji ze to bude implementovano v nekterem FW. Ja jsem si psal FW pro zmineny stroj od zakladu sam.
Ja to na krokacich pouzivam v jednom jednoucelovem CNC obrabecim stroji, ale jen pro hlidani vypadku kroku.
Takze postrehy z praxe: Pro tento ucel se to pouzit da, ale je tam nekolik zadrhelu se kterymi je treba pocitat.
Krokovy motor se vzdy za polohou danou prichazejicimi pulzy trochu zpozduje. To zpozdeni je zavisle na otackach a zatizeni motoru. S tim se musi system do ktereho je zapojen enkoder poprat. U otacek to neni celkem problem, u zatizeni ano, protoze ho system nezna. Z tohoto (a mnoha jinych) duvodu je i nesmysl nejakym zpusobem dorovnavat polohu za chodu motoru.
Pokud by se nejake dorovnavani melo konat, musel by system spocitat v realnem case polohovou, rychlostni i momentovou PIDku a vysledek nejakym zpusobem prenest na motor. Jenze to by arduino nestihalo ani kdyby obsluhovalo jediny motor a nedelalo nic jineho, bezne drivery na to nejsou stavene a ani krokac nedokaze v potrebne chvili zvysit nekolikanasobne moment tak jako servo.
Ja to pouzivam ve stroji proto, ze pokud se neco zasekne apod., pokundi se hodne drahy dil ktery se obrabi, havarie by mohla byt celkem nebezpecna pro obsluhu a ani nastroje nejsou za hubicku. Funguje mi to tak, ze pokud se lisi zadana a skutecna poloha o vic nez 20 mikrokroku, system vyhlasi chybu ztrata kroku a zastavi stroj. Na nic jineho enkoder u beznych krokacu pouzitelny neni, takze pochybuji ze to bude implementovano v nekterem FW. Ja jsem si psal FW pro zmineny stroj od zakladu sam.
- 0
- fdd1222
- Příspěvky: 511
- Images: 0
- Registrován: 12.11.2016 19:59
- Reputation: -5
Re: motory s enkodéry
![]() od zemciko » 13.04.2018 10:59
od zemciko » 13.04.2018 10:59
Nečprodávají se náhodou motory přímo s encoderem co si hlídá pozici bez arduina? Tomu pak stačí dopočítat jednu novou pozici
"https://www.youtube.com/watch?v=_gMozmqbavk"
Stejně tak je hazké video s DC motory a zpětnou vazbou /servo princip na arduinu
"https://www.youtube.com/watch?time_continue=52&v=L-_5KsAOVko"
A co tohle?
"https://www.youtube.com/watch?v=SQyKY9fDAi4"
"https://www.youtube.com/watch?v=_gMozmqbavk"
Stejně tak je hazké video s DC motory a zpětnou vazbou /servo princip na arduinu
"https://www.youtube.com/watch?time_continue=52&v=L-_5KsAOVko"
A co tohle?
"https://www.youtube.com/watch?v=SQyKY9fDAi4"
- 0
Re: motory s enkodéry
![]() od fdd1222 » 13.04.2018 14:23
od fdd1222 » 13.04.2018 14:23
Prodava se kdeco, videa kde pul hodiny cumim na xicht nejakeho rypaka jak placa kraviny jsou o nicem. nahod nejakou tech. dokumentaci s merenim polohovych chyb apod. Tohle vetsinou pouzivaji nadsenci do ruznych robutku apod. kde deset kroku sem nebo tam neni zadny problem.
Nebral jsem samozrejme do uvahy krokace s enkodery ktere byvaji oznacovany jako easy servo viz. napr. zde http://www.cncshop.cz/hybrid-servomotory_c
Ceny motoru i driveru jsou cca desetinasobne, tak pochybuju ze to nekdo nasadi do tiskarny. Navic neni prilis jasne jak je enkoder zapojen do celeho procesu rizeni motoru a u ruznych vyrobcu to muze byt zcela odlisne a tim i vysledek polohovani. Obecne maji ale tyto pohony lepsi vysledky nez obycejne krokace. Tohle ale s beznym krokacem a driverem jen pripojenim encoderu udelat nejde.
Nebral jsem samozrejme do uvahy krokace s enkodery ktere byvaji oznacovany jako easy servo viz. napr. zde http://www.cncshop.cz/hybrid-servomotory_c
Ceny motoru i driveru jsou cca desetinasobne, tak pochybuju ze to nekdo nasadi do tiskarny. Navic neni prilis jasne jak je enkoder zapojen do celeho procesu rizeni motoru a u ruznych vyrobcu to muze byt zcela odlisne a tim i vysledek polohovani. Obecne maji ale tyto pohony lepsi vysledky nez obycejne krokace. Tohle ale s beznym krokacem a driverem jen pripojenim encoderu udelat nejde.
- 0
- fdd1222
- Příspěvky: 511
- Images: 0
- Registrován: 12.11.2016 19:59
- Reputation: -5
Re: motory s enkodéry
![]() od Dargrad » 19.03.2019 17:00
od Dargrad » 19.03.2019 17:00
tak jak to tedy je?
- umí ŘS tiskárny pracovat se servy rozuměno DC motor + enkoder + PID řízení přímo v driveru?
toto nevypadá nijak složitě a už vůbec draze
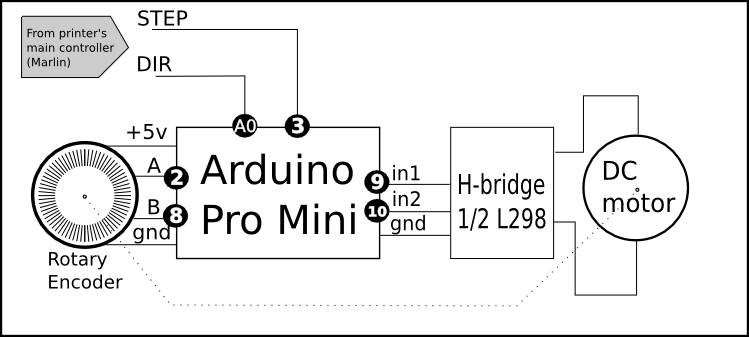
ani encoder není už dnes problém buď vytištěné kolečko + opto štěrbinový snímač jako na obrázku, nebo magnetický princíp enkoderu např. s AS5040
- má to smysl? pokud ano, jsou nějaké praktické zkušenosti?
- umí ŘS tiskárny pracovat se servy rozuměno DC motor + enkoder + PID řízení přímo v driveru?
toto nevypadá nijak složitě a už vůbec draze
ani encoder není už dnes problém buď vytištěné kolečko + opto štěrbinový snímač jako na obrázku, nebo magnetický princíp enkoderu např. s AS5040
- má to smysl? pokud ano, jsou nějaké praktické zkušenosti?
- 0
- Dargrad
- Příspěvky: 14
- Registrován: 30.10.2018 18:24
- Reputation: 0
Re: motory s enkodéry
![]() od Rebel » 19.03.2019 17:07
od Rebel » 19.03.2019 17:07
Tak servo se ve finále budí stejně jako driver na tiskárně, takže co motor, to další arduino/encoder/můstek? Nějak v tom nevidím smysl.
Pokud myslíš podporu přímo ve FW pro snímání encoderu a buzení můstku, tak to asi Marlin či Repetier (tedy nejpoužívanější FW) neumí. Ale navíc v tom opět žádný přínos nevidím.
Pokud myslíš podporu přímo ve FW pro snímání encoderu a buzení můstku, tak to asi Marlin či Repetier (tedy nejpoužívanější FW) neumí. Ale navíc v tom opět žádný přínos nevidím.
- 0
Dan - Rebel ?  - http://rebelove.org - Nevyzkoušíš = nevíš - Rebel I-III, Rebel sCUBE, Anycubic i3 MEGA, Anycubic - Kossel Mini, MeCretor2-upravený, Anycubic Photon, RR1, RR400M ! Pro STL přílohy použij čudlík "UMÍSTIT DO PŘÍSPĚVKU" !
- http://rebelove.org - Nevyzkoušíš = nevíš - Rebel I-III, Rebel sCUBE, Anycubic i3 MEGA, Anycubic - Kossel Mini, MeCretor2-upravený, Anycubic Photon, RR1, RR400M ! Pro STL přílohy použij čudlík "UMÍSTIT DO PŘÍSPĚVKU" !
- Rebel
- Příspěvky: 3896
- Images: 243
- Registrován: 12.08.2013 11:44
- Bydliště: HK.......není Hong Kong :D
- Reputation: 108
 Nebo jsi admin :D")
Re: motory s enkodéry
![]() od Dargrad » 19.03.2019 17:14
od Dargrad » 19.03.2019 17:14
Přínosem by mohlo být to co serva zlepšují - přesnost, spolehlivost, rychlost, dynamika?
- 0
- Dargrad
- Příspěvky: 14
- Registrován: 30.10.2018 18:24
- Reputation: 0
Re: motory s enkodéry
![]() od Rebel » 19.03.2019 17:28
od Rebel » 19.03.2019 17:28
Můj názor:
přesnost - s přesností na současných krokáčů začínáme fyzicky (pominu li mikrokrokování) na cca 0.12mm, což si myslím že je pro plastovej "drát" kterej má nějakou svou výrobní toleranci a klidně se po vytištění o nějaké to procento smrskne úplně dostačující = nefrézujeme
spolehlivos - opravdu si myslíš, že takovej nějakej bastl s tištěným enkodérem a dalším řízením bude spolehlivější oproti driveru k tomu určenému a motory s poměrně slušnými parametry?
rychlost - pokud tiskneš, tak sám víš, že ta není až tak podstatná
dynamika - v překladu zřejmě akcelerace - ano, to má své výhody, ale i nevýhody, protože pak záleží i na pevnosti konstrukce atd.
Vidím to spíše jako složitější a méně spolehlivé řešení s lepšími akceleracemi, ale to je jen můj názor. Nevím na kolik jsi zkušený a kolik vlastních tiskáren sis postavil, ale já bych do toho nešel.
přesnost - s přesností na současných krokáčů začínáme fyzicky (pominu li mikrokrokování) na cca 0.12mm, což si myslím že je pro plastovej "drát" kterej má nějakou svou výrobní toleranci a klidně se po vytištění o nějaké to procento smrskne úplně dostačující = nefrézujeme
spolehlivos - opravdu si myslíš, že takovej nějakej bastl s tištěným enkodérem a dalším řízením bude spolehlivější oproti driveru k tomu určenému a motory s poměrně slušnými parametry?
rychlost - pokud tiskneš, tak sám víš, že ta není až tak podstatná
dynamika - v překladu zřejmě akcelerace - ano, to má své výhody, ale i nevýhody, protože pak záleží i na pevnosti konstrukce atd.
Vidím to spíše jako složitější a méně spolehlivé řešení s lepšími akceleracemi, ale to je jen můj názor. Nevím na kolik jsi zkušený a kolik vlastních tiskáren sis postavil, ale já bych do toho nešel.
- 0
Dan - Rebel ? - http://rebelove.org - Nevyzkoušíš = nevíš - Rebel I-III, Rebel sCUBE, Anycubic i3 MEGA, Anycubic - Kossel Mini, MeCretor2-upravený, Anycubic Photon, RR1, RR400M ! Pro STL přílohy použij čudlík "UMÍSTIT DO PŘÍSPĚVKU" !
- Rebel
- Příspěvky: 3896
- Images: 243
- Registrován: 12.08.2013 11:44
- Bydliště: HK.......není Hong Kong :D
- Reputation: 108
Příspěvků: 17
• Stránka 1 z 2 • 1, 2
Kdo je online
Uživatelé procházející toto fórum: Žádní registrovaní uživatelé a 25 návštevníků